篇首语:本文由编程笔记#小编为大家整理,主要介绍了神经网络入门(详细 )相关的知识,希望对你有一定的参考价值。
机器学习需要人工选取数据,提取数据。
深度学习是机器学习的一部分。
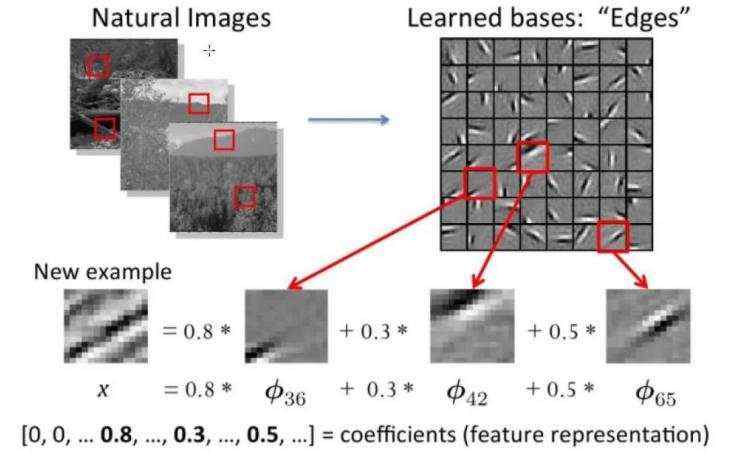
·解决核心是,如何去提取特征



数据:两类点方块和三角
绿色的点属于方块还是三角呢?
K=3还是K=5?结果一样吗?
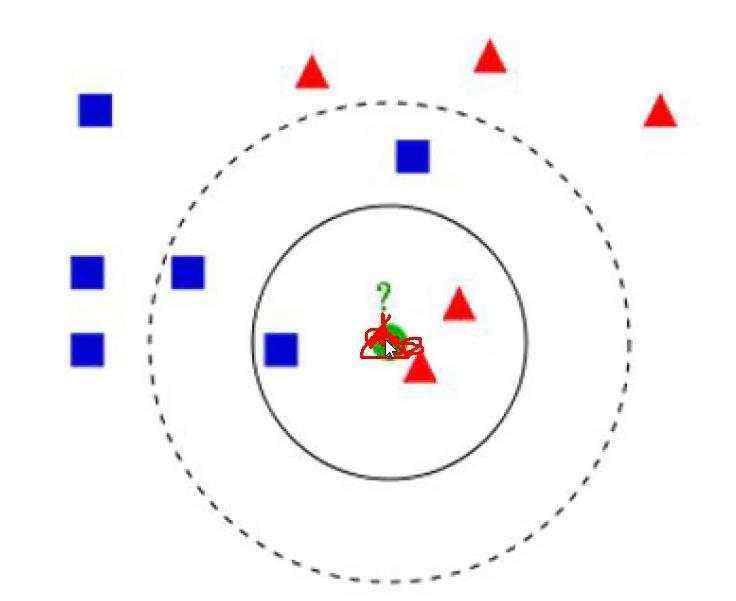
KNN 算法本身简单有效,它是一种 lazy-learning 算法。
分类器不需要使用训练集进行训练,训练时间复杂度为0。
KNN 分类的计算复杂度和训练集中的文档数目成正比,也就是说,如果训练集中文档总数为 n,那么 KNN 的分类时间复杂度为O(n)。
K 值的选择,距离度量和分类决策规则是该算法的三个基本要素。
L1 distance:
d
1
(
I
1
,
I
2
)
=
∑
p
∣
I
1
p
−
I
2
p
∣
d_1(I_1,I_2)=\\sum_p \\vert I_1^p - I_2^p \\vert
d1(I1,I2)=∑p∣I1p−I2p∣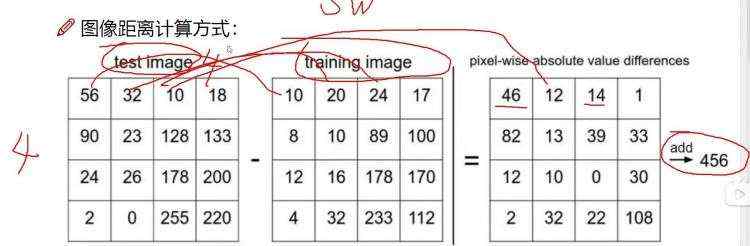
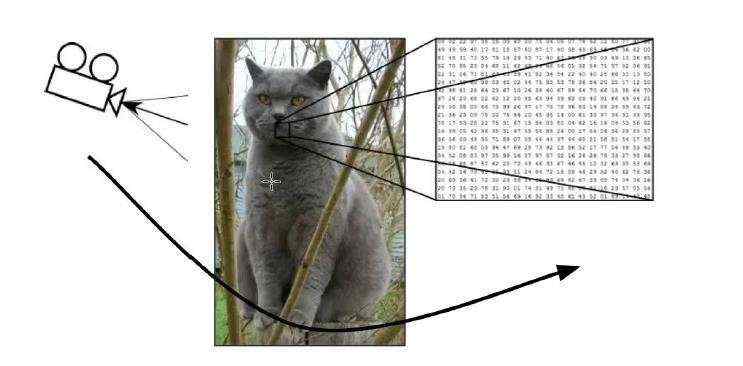
背景主导是一个最大的问题,我们关注的却是主体(主要成分)
如何才能让机器学习到哪些是重要的成分呢?
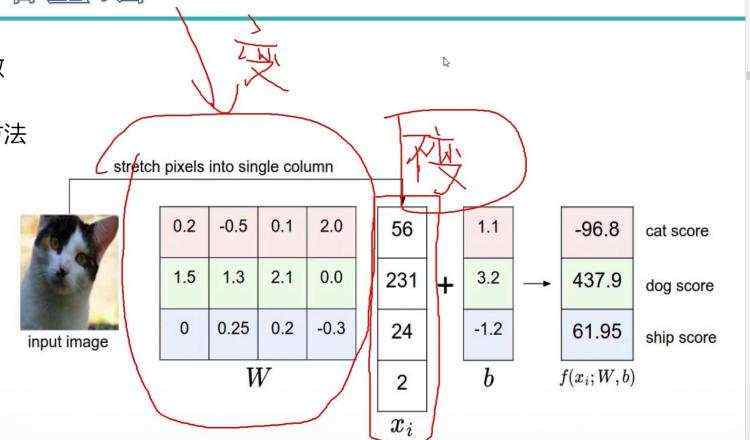
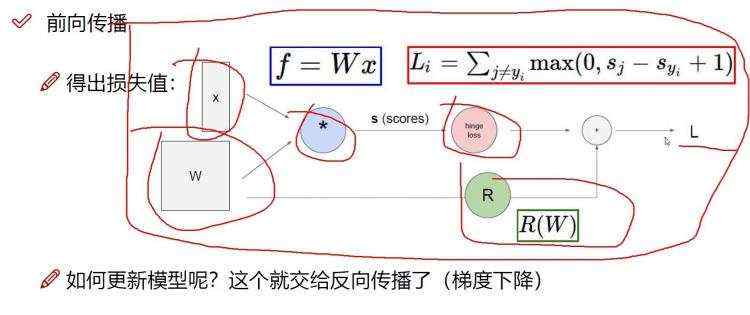
从输入 --> 输出的映射
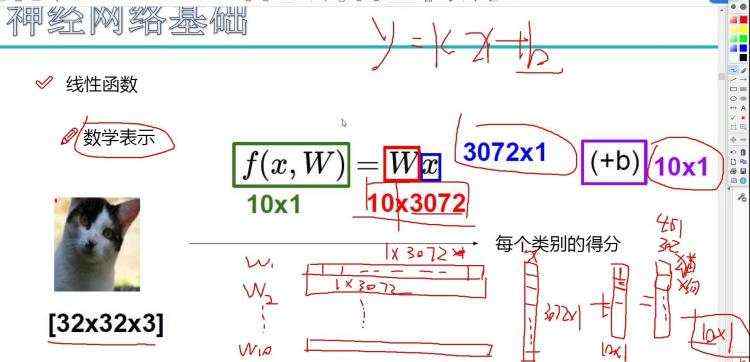
什么样的 W 更适合我们的预期目标
如何衡量分类的结果呢?
结果的得分值有着明显的差异,我们需要明确的指导模型的当前效果,有多好或是多差!
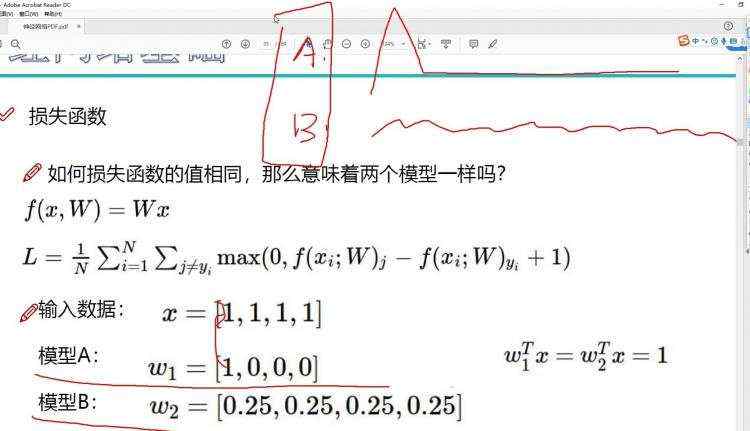
如果损失函数的值相同,那么意味着两个模型一样吗?
在训练过程中,关注权重参数是否会发生变异,发生过拟合
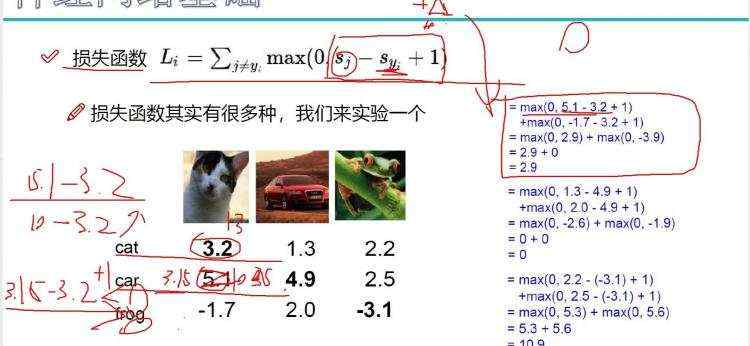
损失函数其实有很多种,我们来实验一个
S
j
S_j
Sj 错误类别,
S
y
i
S_y_i
Syi 正确类别
Δ
\\Delta
Δ表示容忍程度
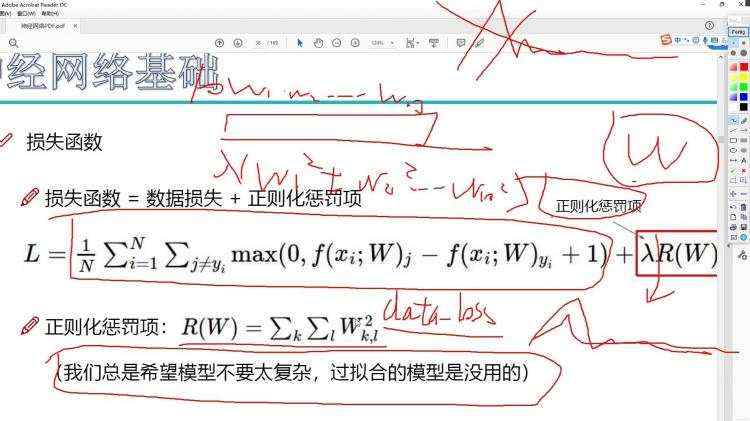
神经网络的缺点就是太强了
λ
\\lambda
λ越大,抑制效果越强
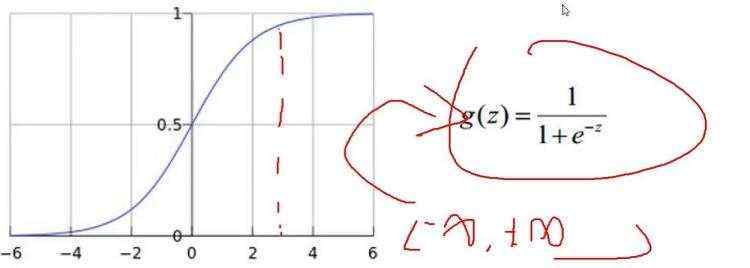
现在我们得到的是一个输入的得分值,但如果给我一个概率值岂不更好!
如何把一个得分值转换成一个概率值呢?
归一化:
P
(
Y
=
k
∣
x
=
x
i
)
=
e
s
k
∑
j
e
s
j
P(Y=k|x=x_i)= e^sk \\over \\sum_je^sj
P(Y=k∣x=xi)=∑jesjesk
\\qquad
where
\\;
s
=
f
(
x
i
;
W
)
s=f(x_i;W)
s=f(xi;W)
计算损失值:
L
i
=
−
l
o
g
P
(
Y
=
y
i
∣
X
=
x
i
)
L_i=-logP(Y=y_i|X=x_i)
Li=−logP(Y=yi∣X=xi)
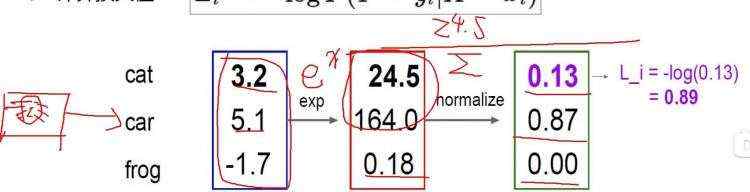
交叉熵损失函数
通过对数函数求损失
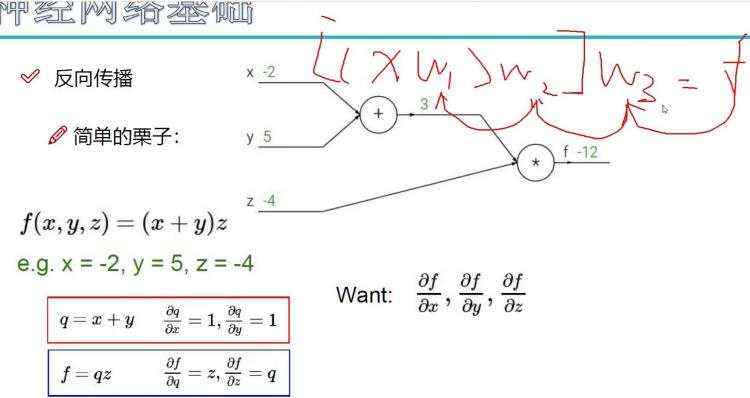
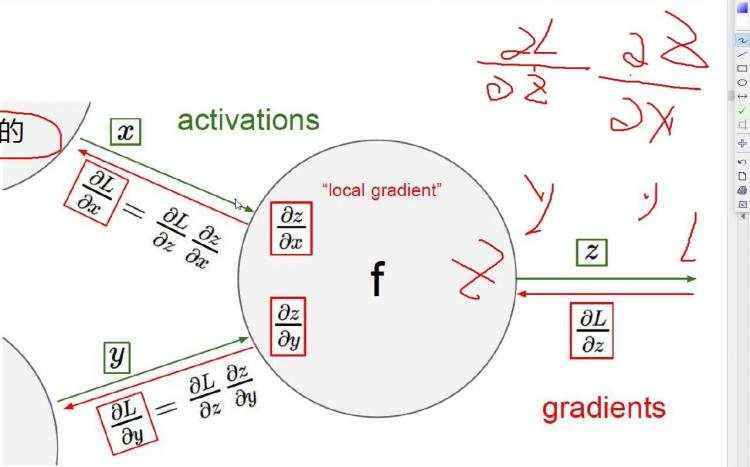
从后往前,逐层逐步传播
加法门单元:均等分配
MAX门单元:给最大的
乘法门单元:互换的感觉
梯度是一步一步传的
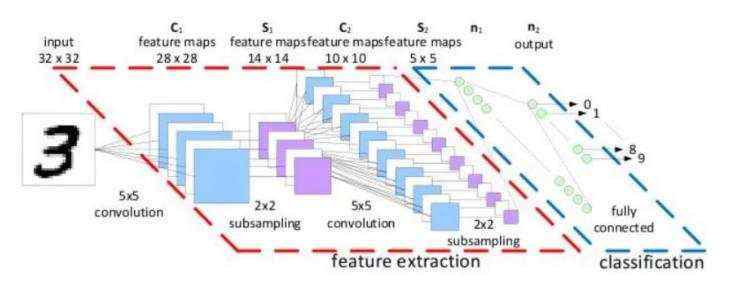
·
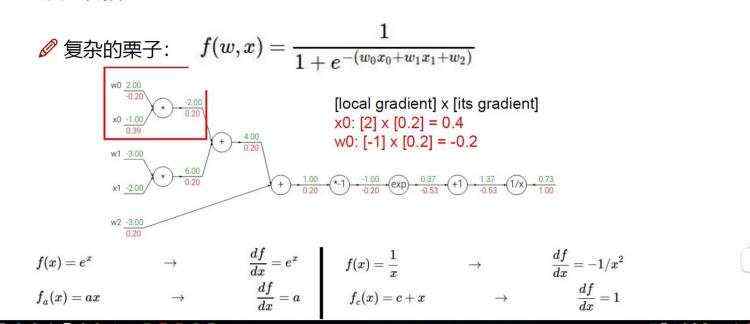
非线性:激活函数sigmod、max、relu等
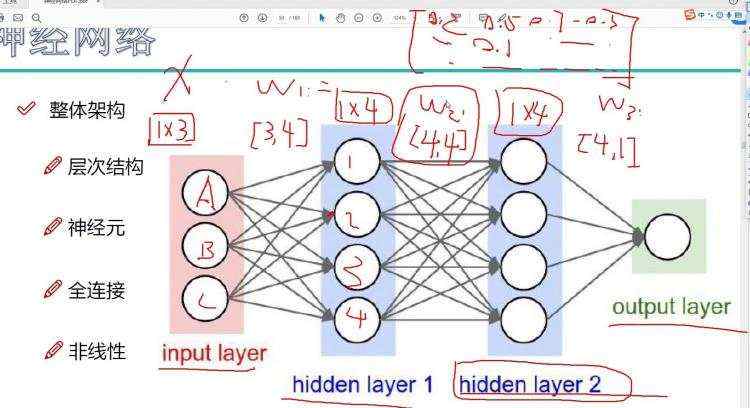
基本结构:
f
=
W
2
m
a
x
(
0
,
W
1
x
)
f=W_2max(0,W_1x)
f=W2max(0,W1x)
继续堆叠一层:
f
=
W
3
m
a
x
(
0
,
W
2
m
a
x
(
0
,
W
1
x
)
)
f=W_3max(0,W_2max(0,W_1x))
f=W3max(0,W2max(0,W1x))
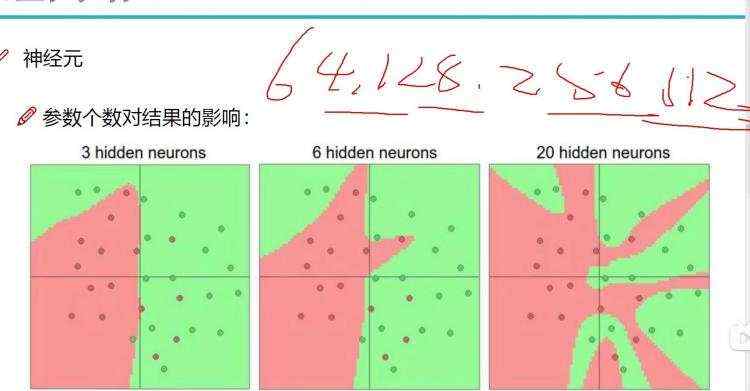
神经网络的强大之处在于,用更多的参数来拟合复杂的数据
(参数多到多少呢?百万级别都是小儿科,但是参数越多越好吗?)
神经元个数越多,得到的过拟合成对越大,在计算机上得到的效果可能会越好,运行速度相对会变慢。
https://cs.stanford.edu/people/karpathy/convnetjs/demo/classify2d.html

惩罚力度加大,W更加正常,边界更加平滑,防止过拟合
非常重要的一部分
常用的激活函数(Sigmoid,Relu,Tanh等)
激活函数对比
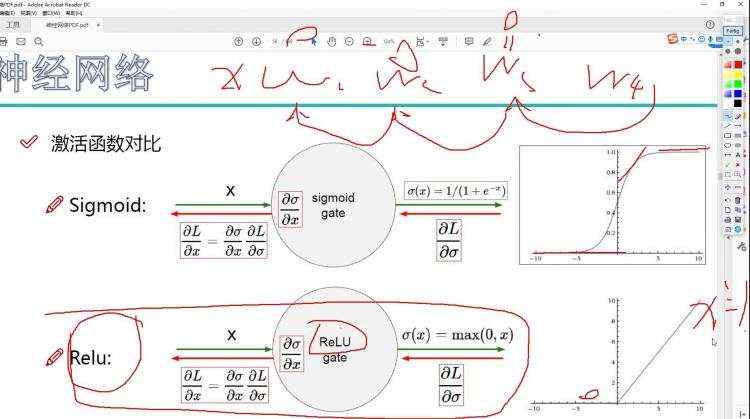
Sigmod 函数可能会造成梯度消失
现在市面上多采用 Relu 函数及其变式
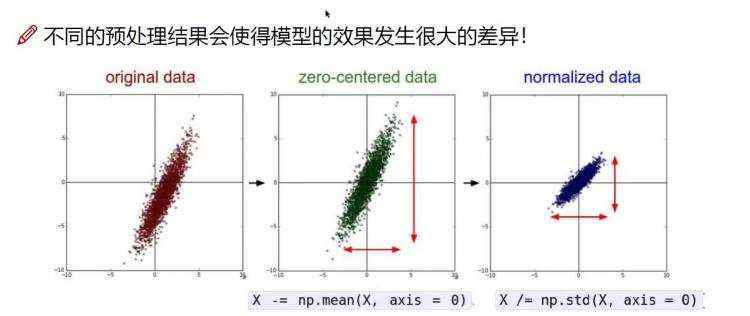
不同的预处理结果会使得模型的效果发生很大的差异。
参数初始化同样非常重要
通常我们都使用随机策略来进行参数初始化
W
=
0.01
∗
n
p
.
r
a
n
d
o
m
.
r
a
n
d
n
(
D
,
H
)
W = 0.01* np.random.randn(D,H)
W=0.01∗np.random.randn(D,H)
让W值尽可能比较小,平滑
过拟合是神经网络非常头疼的一个大问题!
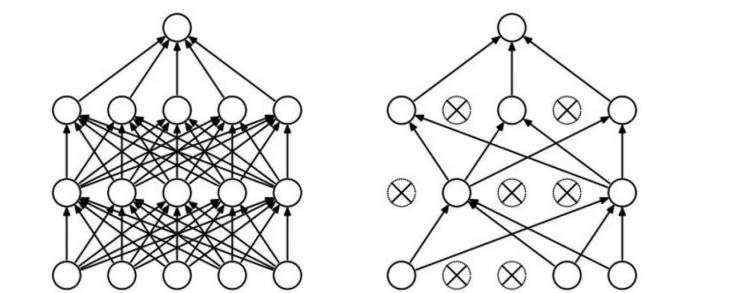
在每一轮训练中,随机选择一些神经元杀死。
在训练中,每层每一次随机选择一部分杀死。
目标函数:
J
(
θ
0
,
θ
1
)
=
1
2
m
∑
1
m
(
h
θ
(
x
(
i
)
−
y
(
i
)
)
)
J(\\theta_0,\\theta_1) = 1 \\over 2m\\sum_1^m(h_\\theta(x^(i)-y^(i)))
J(θ0,θ1)=2m1∑1m(hθ(x(i)−y(i)))
寻找山谷的最低点,也就是我们的目标函数终点(什么样的参数能使得目标函数达到极值点)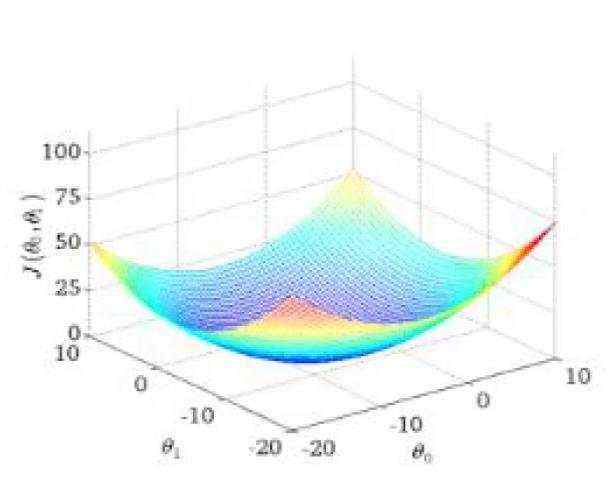
下山分几步走呢?(更新参数)
(1):找到当前最合适的方向
(2):走那么一小步,走快了该“跌倒”了
(3):按照方向与步伐去更新我们的参数



![[译]技术公司十年经验的职场生涯回顾](https://img8.php1.cn/3cdc5/24912/711/b6574f3292f9dc00.png)

 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有